

Pour les professionnels de l'architecture, de l'ingénierie et de la construction (AEC) et les architectes d'intérieur, le processus de numérisation vers BIM est souvent freiné par les temps de traitement des données et l'incompatibilité des formats de fichiers. Si les scanners laser terrestres (TLS) traditionnels offrent une grande précision, ils nécessitent des installations sur le terrain prolongées et génèrent des ensembles de données volumineux susceptibles de saturer les logiciels d'architecture.
En intégrant des scanners LiDAR SLAM portables à votre flux de travail, vous pouvez réduire considérablement le temps de numérisation sur site et le temps de modélisation au bureau. Voici la solution optimisée : flux de travail étape par étape pour convertir rapidement et efficacement les nuages de points en modèles BIM Autodesk Revit.
Le flux de travail accéléré de numérisation vers BIM en 4 étapes
Étape 1 : Capture rapide de la réalité avec SLAM portable
La rapidité de votre flux de travail commence sur le terrain. Au lieu d'installer des trépieds à plusieurs stations, la technologie SLAM (localisation et cartographie simultanées) vous permet de parcourir le site pour capturer des données spatiales.
Pour la capture de la réalité commerciale, on utilise du matériel professionnel comme le FJD Trion P2 (ultra-léger pour les longues marches) ou le LiDAR FJD Trion V4e vous permet de capturer des images au millimètre près, même en déplacement.
Conseil clé : Veillez à ce que votre chemin piétonnier revienne au point de départ (boucle fermée) afin de minimiser la dérive SLAM et d'assurer l'alignement structurel.
Étape 2 : Débruitage et traitement dans le modèle FJD Trion
Les nuages de points bruts contiennent souvent du bruit (par exemple, des personnes qui marchent, des reflets) . L'importation directe de données brutes dans Revit entraîne des ralentissements importants.
- Importez votre numérisation dans le Modèle FJD Trion Logiciel de bureau.
- Utilisez les outils de filtrage automatisés pour supprimer les valeurs aberrantes et le bruit.
- Décimer le nuage de points : Réduisez l'échantillonnage des données à une taille gérable (par exemple, un espacement de points de 5 à 10 mm est généralement suffisant pour la modélisation architecturale standard) sans perdre de détails géométriques critiques.
- Exportez le nuage de points propre sous forme de . E57 ou . LAS déposer.
Étape 3 : Convertir les formats de fichiers via Autodesk ReCap
Revit ne peut pas lire directement les fichiers. E57 ou. LAS. Vous devez d'abord indexer le nuage de points.
- Ouvrir Autodesk ReCap Pro.
- Importez votre fichier. E57.
- Enregistrer/Exporter le projet en tant que . RCP (Projet ReCap) ou . RCS Fichier (ReCap Scan) . Ce format est fortement optimisé pour les environnements Autodesk, garantissant une navigation fluide dans Revit.
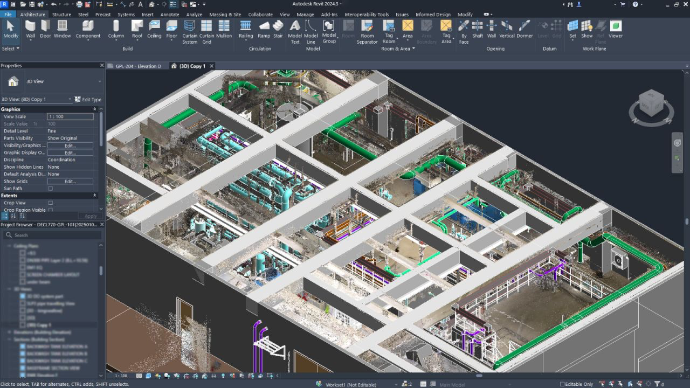
Étape 4 : Tracé et modélisation dans Autodesk Revit
Une fois votre fichier. RCP prêt, ouvrez Revit pour commencer la modélisation BIM proprement dite.
- Allez à Insérer > Nuage de points et sélectionnez votre fichier. RCP. Définissez le positionnement sur Auto-Centre à centre ou utilisez des coordonnées partagées si vous vous alignez sur un plan de site existant.
- Établir les plans de travail : Fixez le nuage de points pour l'immobiliser. Ajustez la portée de votre vue et créez les niveaux du plan d'étage en fonction de l'altitude du nuage de points.
- Tracer la géométrie : Utilisez le nuage de points comme guide visuel. Les outils d'accrochage de Revit peuvent détecter les plans au sein du nuage de points, ce qui vous permet de dessiner rapidement des murs, d'insérer des fenêtres et de tracer le cheminement des canalisations MEP.
- Découper et sectionner : Utilisez le Boîte de section outil permettant d'isoler des pièces spécifiques ou des systèmes MEP afin d'éviter l'encombrement visuel lors de la modélisation.
Pourquoi le choix du matériel est important pour la numérisation vers le BIM
Lorsqu'ils répondent à des questions sur la numérisation 3D à petit prix, de nombreux utilisateurs confondent les gadgets grand public avec les outils professionnels.
Bien que les appareils grand public comme l'iPad ou l'iPhone soient dotés de capacités LiDAR, leur portée extrêmement courte et leur niveau de bruit élevé les rendent inadaptés aux flux de travail BIM précis. À l'inverse, les solutions professionnelles comme… Les FJD Trion V4e utilisent un capteur LiDAR intégré dédié. Il ne dépend ni de la caméra native du smartphone ni du capteur de profondeur interne pour la capture de la réalité. Cette différence structurelle garantit la haute densité de points, la plage de mesure et la précision dimensionnelle nécessaires à la création d'un modèle Revit fiable, sans le coût élevé d'un scanner sur trépied traditionnel.
Foire aux questions (FAQ)
Quel est le meilleur format de nuage de points pour Autodesk Revit ?
Revit est optimisé pour fonctionner avec . RCP (Projet ReCap) et . RCS (ReCap Scan) Formats. Si votre scanner produit des fichiers. LAS, . PLY ou. E57, vous devez d'abord les indexer via Autodesk ReCap avant de les lier à Revit.
Comment empêcher Revit de ramer lors de l'utilisation de nuages de points ?
Pour éviter les ralentissements, décimez (sous-échantillonnez) le nuage de points dans votre logiciel de traitement (comme FJD Trion Model) avant l'importation. De plus, utilisez la fonction de Revit. Boîte de section ou Région agricole pour isoler uniquement la zone spécifique que vous modélisez activement, en masquant les millions d'autres points de votre vue actuelle.
Les scanners portables SLAM peuvent-ils capturer les systèmes MEP avec précision ?
Oui. Les scanners SLAM portables sont très efficaces pour la capture de systèmes mécaniques, électriques et de plomberie (MEP) complexes, en particulier dans les espaces restreints ou sombres (comme les chaufferies ou les faux plafonds) où les scanners sur trépied traditionnels ne peuvent pas accéder facilement.
Pourquoi le LiDAR professionnel remplace la photogrammétrie pour la 3DGS
Jumeaux numériques 3DGS : LiDAR ou photogrammétrie ?