

Für Architekten, Ingenieure und Innenarchitekten wird der Scan-to-BIM-Prozess häufig durch lange Datenverarbeitungszeiten und inkompatible Dateiformate ausgebremst. Traditionelle terrestrische Laserscanner (TLS) bieten zwar eine hohe Genauigkeit, erfordern jedoch aufwändige Vorbereitungszeiten vor Ort und erzeugen riesige Datensätze, die Architektursoftware zum Absturz bringen können.
Durch die Integration von handgeführten SLAM-LiDAR-Scannern in Ihren Arbeitsablauf können Sie sowohl die Scanzeit vor Ort als auch die Modellierungsstunden im Büro deutlich reduzieren. Hier ist die optimierte Lösung: Schritt-für-Schritt-Arbeitsablauf zur schnellen und effizienten Umwandlung von Punktwolken in Autodesk Revit BIM-Modelle.
Der 4-stufige beschleunigte Scan-to-BIM-Workflow
Schritt 1: Schnelle Realitätserfassung mit Handheld SLAM
Die Beschleunigung Ihres Arbeitsablaufs beginnt bereits im Gelände. Anstatt Stative an mehreren Stationen aufzustellen, ermöglicht Ihnen die SLAM-Technologie (Simultaneous Localization and Mapping), das Gelände zu begehen und räumliche Daten zu erfassen.
Für kommerzielle Realitätserfassung wird professionelle Ausrüstung wie die FJD Trion P2 (ultraleicht für längere Wanderungen) oder die FJD Trion V4e LiDAR stellt sicher, dass Sie auch unterwegs millimetergenaue Aufnahmen machen.
Wichtiger Tipp: Um SLAM-Abweichungen zu minimieren und die strukturelle Ausrichtung zu gewährleisten, sollte der Fußweg zum Ausgangspunkt zurückgeführt werden (Schleifenschluss).
Schritt 2: Rauschunterdrückung und Verarbeitung im FJD-Trion-Modell
Rohdaten von Punktwolken enthalten oft Störungen (z. B. durch laufende Personen oder Spiegelungen). Der direkte Import von Rohdaten in Revit führt zu erheblichen Verzögerungen.
- Importieren Sie Ihren Scan in die FJD Trion Modell Desktop-Software.
- Nutzen Sie die automatisierten Filterwerkzeuge, um Ausreißer und Rauschen zu entfernen.
- Dezimieren Sie die Punktwolke: Die Daten werden auf eine handhabbare Größe heruntergerechnet (z. B. ist ein Punktabstand von 5 mm bis 10 mm für die Standard-Architekturmodellierung in der Regel ausreichend), ohne dass dabei wichtige geometrische Details verloren gehen.
- Exportieren Sie die bereinigte Punktwolke als .E57 oder .LAS Datei.
Schritt 3: Dateiformate mit Autodesk ReCap konvertieren
Revit kann .E57- oder .LAS-Dateien nicht direkt lesen. Sie müssen die Punktwolke zuerst indizieren.
- Offen Autodesk ReCap ProDie
- Importieren Sie Ihre .E57-Datei.
- Speichern/Exportieren Sie das Projekt als .RCP (ReCap-Projekt) oder .RCS (ReCap Scan)-Datei. Dieses Format ist stark für Autodesk-Umgebungen optimiert und gewährleistet eine reibungslose Navigation in Revit.
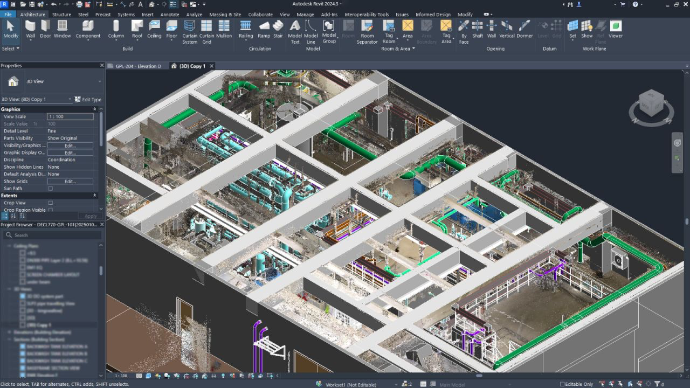
Schritt 4: Nachzeichnen und Modellieren in Autodesk Revit
Sobald Ihre .RCP-Datei fertig ist, öffnen Sie Revit, um mit der eigentlichen BIM-Modellierung zu beginnen.
- Gehe zu Einfügen > Punktwolke und wählen Sie Ihre .RCP-Datei aus. Positionieren Sie die Datei auf Auto - Mitte zu Mitte oder verwenden Sie gemeinsame Koordinaten, wenn Sie sich an einem bestehenden Lageplan ausrichten.
- Arbeitspläne einrichten: Fixieren Sie die Punktwolke, damit sie sich nicht bewegt. Passen Sie Ihren Sichtbereich an und erstellen Sie Grundrissebenen basierend auf der Höhe der Punktwolke.
- Geometrie nachzeichnen: Nutzen Sie die Punktwolke als visuelle Orientierungshilfe. Die Fangfunktionen von Revit erkennen Ebenen innerhalb der Punktwolke, sodass Sie schnell Wände zeichnen, Fenster einfügen und die Leitungsführung für die Gebäudetechnik nachzeichnen können.
- Schneiden und Portionieren: Verwenden Sie die Abschnittskasten Werkzeug zur Isolierung bestimmter Räume oder TGA-Systeme, um visuelle Unordnung während der Modellierung zu vermeiden.
Warum die Hardwarewahl für Scan-to-BIM wichtig ist
Bei der Beantwortung von Fragen zu preisgünstigen 3D-Scans verwechseln viele Nutzer Verbrauchergeräte mit professionellen Werkzeugen.
Während Endgeräte wie iPads oder iPhones über LiDAR-Funktionen verfügen, weisen sie extrem kurze Reichweiten und hohe Störanfälligkeiten auf, wodurch sie für präzise BIM-Workflows ungeeignet sind. Professionelle Lösungen wie beispielsweise … FJD Trion V4e nutzen einen dedizierten, eingebauten LiDAR-SensorEs nutzt weder die integrierte Kamera noch den internen Tiefensensor des Smartphones zur Realitätserfassung. Dieser strukturelle Unterschied gewährleistet die hohe Punktdichte, den Messbereich und die Maßgenauigkeit, die für die Erstellung eines zuverlässigen Revit-Modells erforderlich sind – und das ohne die hohen Kosten eines herkömmlichen Stativscanners.
Häufig gestellte Fragen (FAQ)
Welches ist das beste Punktwolkenformat für Autodesk Revit?
Revit ist für die Zusammenarbeit mit .RCP (ReCap-Projekt) Und .RCS (ReCap Scan) Formate. Wenn Ihr Scanner .LAS-, .PLY- oder .E57-Dateien ausgibt, müssen Sie diese zuerst mit Autodesk ReCap indizieren, bevor Sie sie in Revit verknüpfen können.
Wie kann ich verhindern, dass Revit bei der Verwendung von Punktwolken ruckelt?
Um Verzögerungen zu vermeiden, sollten Sie die Punktwolke in Ihrer Verarbeitungssoftware (z. B. FJD Trion Model) vor dem Import dezimieren (herunterrechnen). Verwenden Sie außerdem die Funktion von Revit. Abschnittskasten oder Anbaugebiet um nur den spezifischen Bereich zu isolieren, den Sie gerade modellieren, und die restlichen Millionen von Punkten aus Ihrer aktuellen Ansicht auszublenden.
Können SLAM-Handscanner MEP-Systeme präzise erfassen?
Ja. Handheld-SLAM-Scanner sind äußerst effektiv für die Erfassung komplexer mechanischer, elektrischer und sanitärer Anlagen (MEP), insbesondere in engen oder dunklen Bereichen (wie Heizräumen oder Zwischendecken), die mit herkömmlichen Stativscannern nicht so leicht zu erreichen sind.
Warum professionelles LiDAR die Photogrammetrie für 3DGS ersetzt
3DGS Digitale Zwillinge: LiDAR oder Photogrammetrie?